| Coursename | Einführung in die Echtzeit-Kontrolle von aktuierten Systemen |
| Course number in TuCan | 03-41-0582-se |
| Type | Seminar with practical tutorials |
| Credits | 5 CP |
| Offered | every summer semester |

This module is aiming at teaching students
- human locomotion principles with biomechanic simulation models
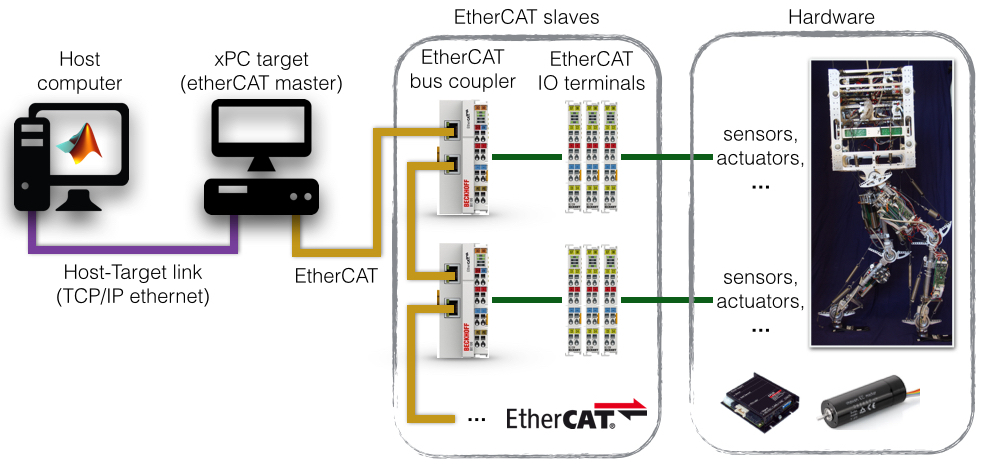
- how to setup and control a dynamic system in real-time
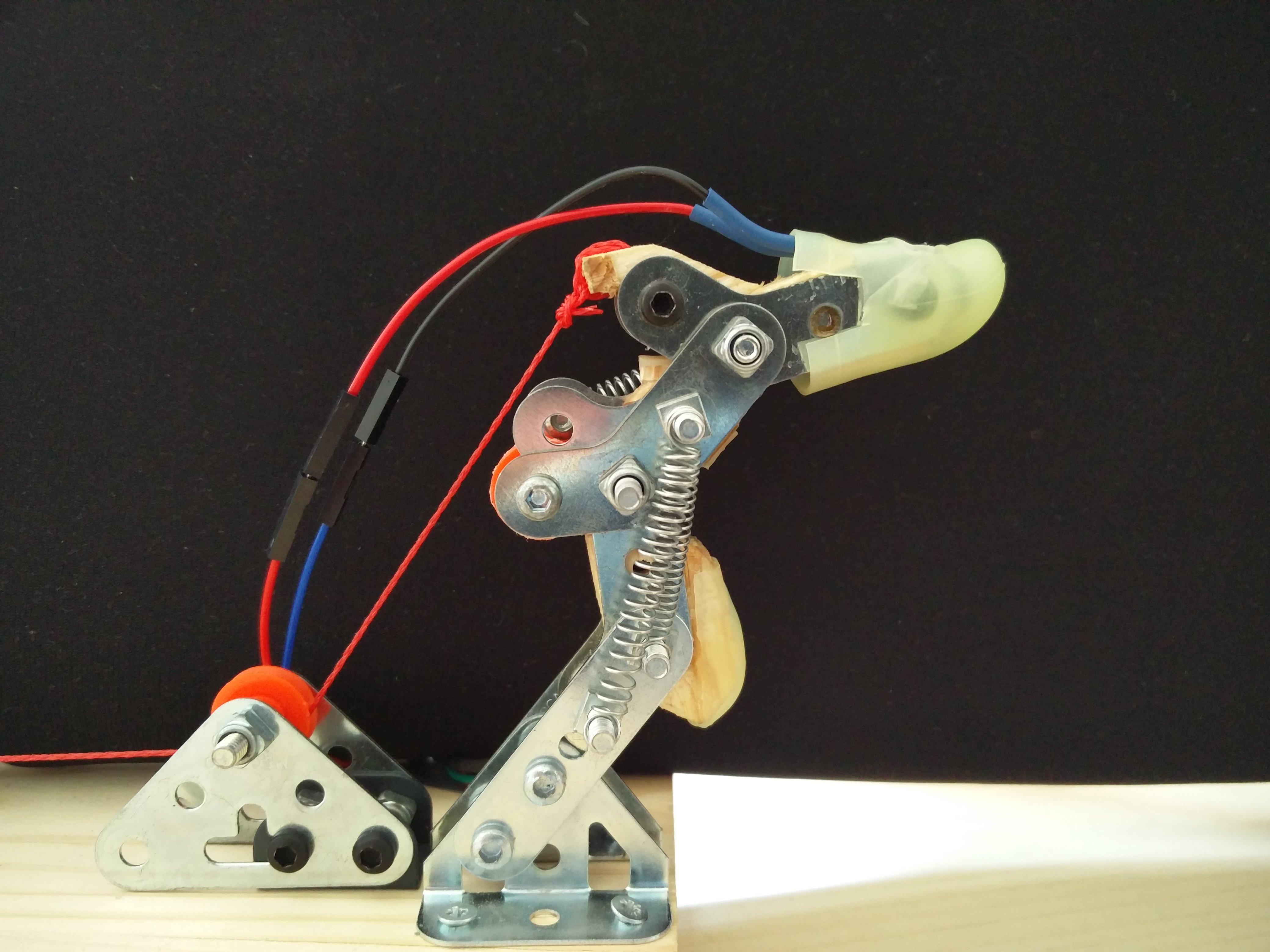
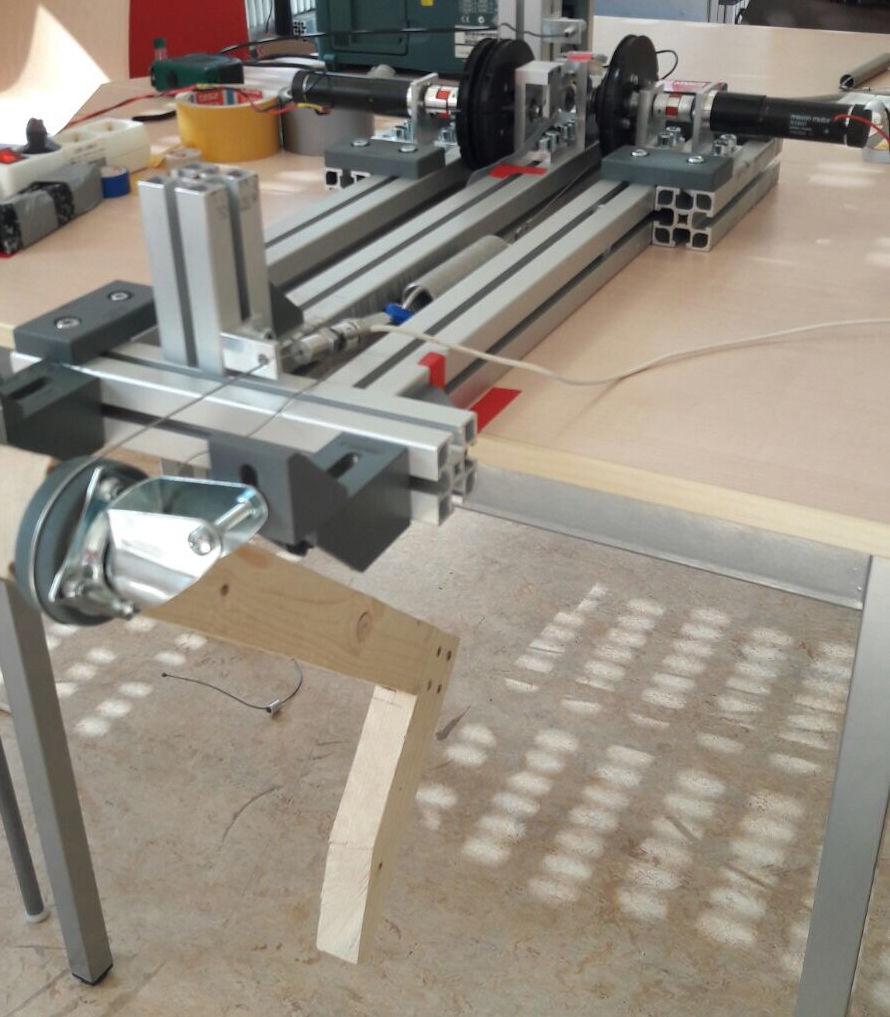
- how to control a simple system to demonstrate human locomotion principles in hardware.
In the first part, students will learn how to analyze human locomotion (e.g. hopping, walking, running) with ground reaction forces and joint kinematics based on inverse dynamics approach. Then forward dynamic modelling approach (spring loaded inverted pendulum) will be introduced to describe and explain human locomotion.
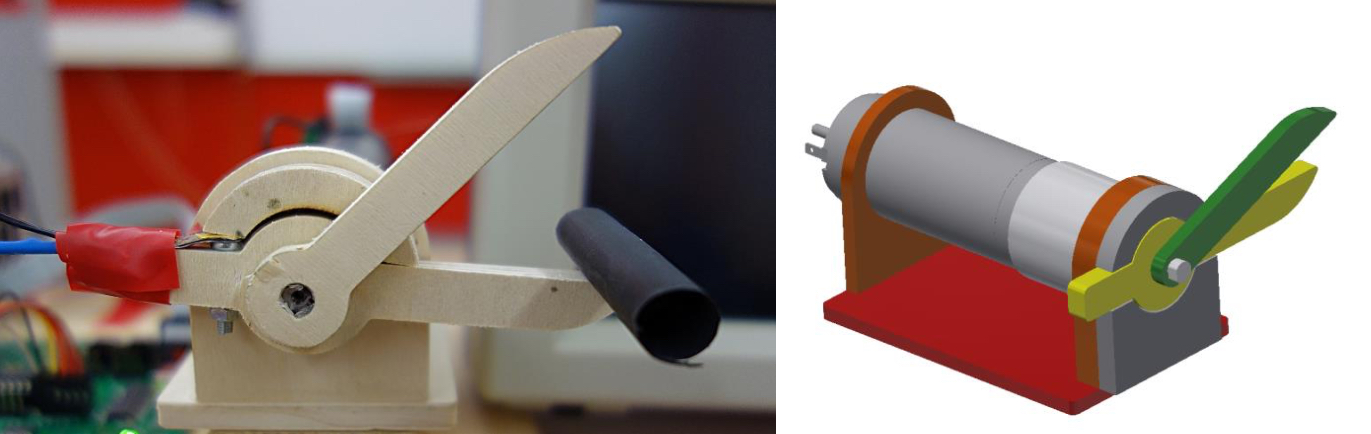
In the second part, students will learn how to control a single actuator (e.g. electric motor, pneumatic artificial muscle) system in real-time. This includes dynamic system modelling, basic control theory, sensor and actuator selection and real-time control implementation (e.g. Arduino, Matlab Real-Time).
In the last part, with the knowledge acquired from human biomechanics and dynamic system control, students will setup a simple system and demonstrate the human movement principles. For example, students could build an elbow soft exoskeleton to assist human arm movement.