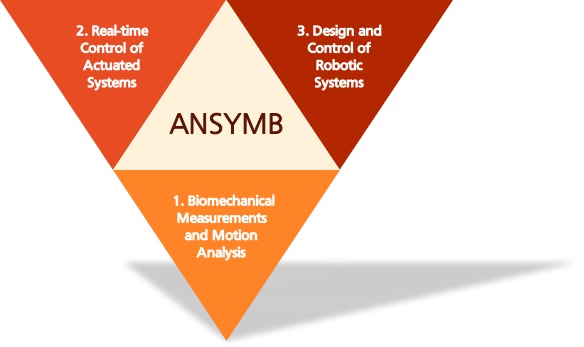
- Collection and analysis of motion data by different measuring techniques (e.g., electromyography, dynamometry, kinematics, isokinetics, psychomotoric measurements and spiroergometry): The gained knowledge will be used in practical applications. By this, specific properties and limitations of different measuring techniques will be identified.
- Programming and signal analysis with Matlab: students learn how to process and analyze raw data (e.g., identification of measurement errors)
- Integrative modelleling of biological systems (e.g., basic muscle models, bipedal walking models) in Matlab: students learn to explore the influence of different model parameters on the motion excecution by designing and using simulation models.
- Control approaches of robotic systems: students learn to implement basic control algorithms in simulation systems.
- Introduction to mechantronic systems: Design and Implementation of actuators, sensors and control platforms (e.g., Arduino, Matlab etc.).
- Application of the gained knowledge on simple and modifiable bipedal robots: students can test and validate their programmes and hypotheses to gain a comprehensive understanding of the biological movements and the capabilities of hardware implementations.
- Integration of motion principles in advanced robotic systems (e.g., active prostheses): students learn aspects of prosthetic design, simulation of control approaches and their implementation in available systems (e.g., SpringActive „Odyssey“ Prothese, Össur „Power Knee“).
Analysis and Synthesis of Human Movements
On this webpage you will find information about the teaching project "Analyse und Synthese Menschlicher Bewegungen" (ANSYMB). Below is a general description of the teaching project.
From basics of human science to practical applications
This teaching project aims at bringing students into contact with interdisciplinary methods of measuring and processing human movement data as well as the technical implementation of different locomotion tasks (e.g., robotics or prosthetics). The modules are relevant for a variety of students, but especially for students from sport science, psychology, mechanical engineering, electrical engineering or computer science.
Contact
Prof. Dr. André Seyfarth
Executive Director

andre.seyfarth@tu-...
work +49 6151 16-24118
fax +49 6151 16-24129
Work
S1|17 101
Magdalenenstraße 27
64289
Darmstadt
Dr. Guoping Zhao